Get ArduiDrone – Arduino code for Drones (Quadcopter) Download

1. Introduction
This Arduino sketch presents a flight controller for an X quadcopter centered on an Arduino Uno board and the MPU6050 sensor.
Fundamentally, this automation regimen is an implementation of a digital PID with a refresh price of 250Hz. The process made use of to work out PID coefficients is Ziegler Nichols method. The frame of the quadcopter is centered on the F450.
2. Needs
- Arduino libraries: Wire
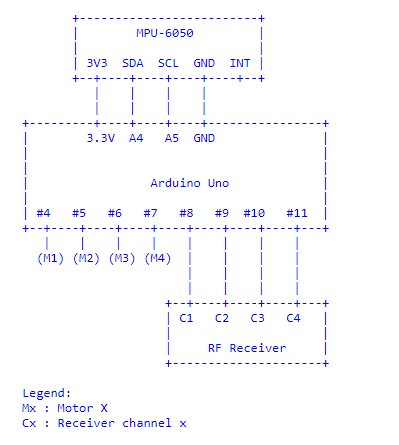
3. Pin connection:
4. Configuration
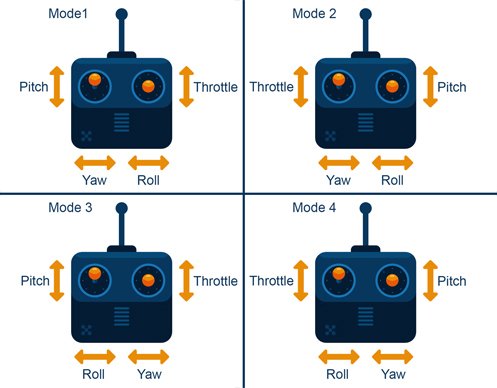
4.1 Distant configuration
By default, this sketch employs the method 2 for RF remote, according to the following photograph:
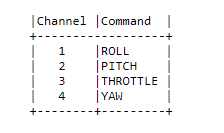
The channel mapping is then :
5. Quadcopter orientation

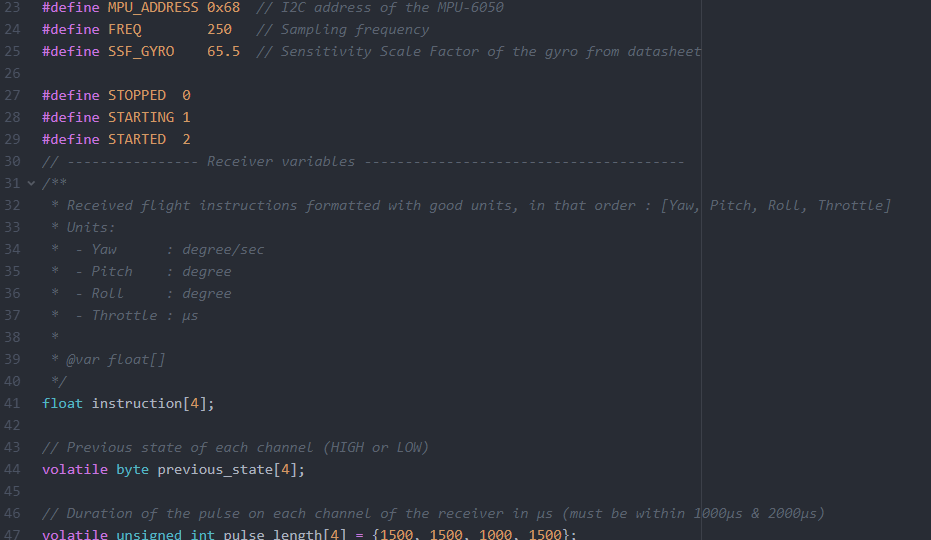
6.code
- very well commented
")

7. Commence/end
This sketch arrives with a basic safety system : to start off the quadcopter, shift the left adhere of the distant in the base left corner. Then transfer it back in middle position.
To quit the quadcopter, transfer the left adhere in the bottom suitable corner.
8. Adjust Log
------------ Variation - 1..: Release on 10 Decembre 2018 ------------
[+] Initial Launch